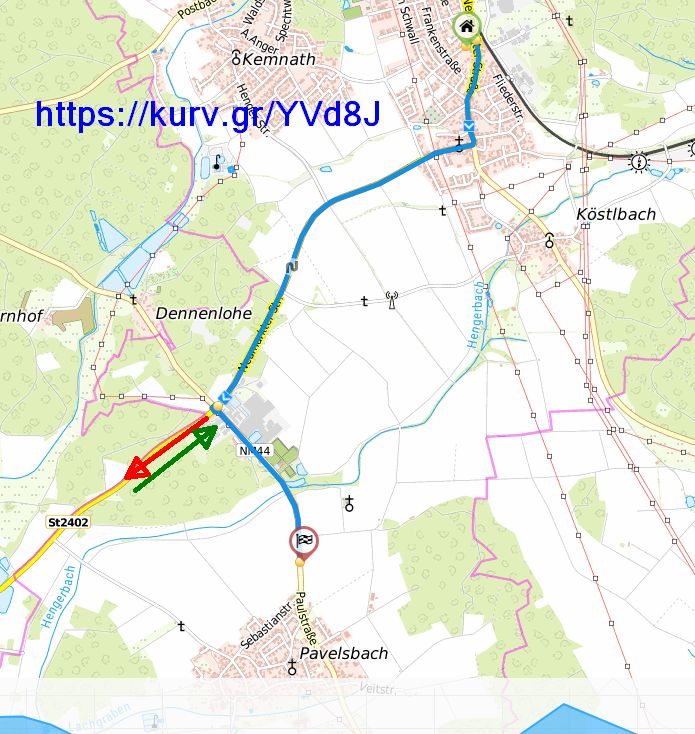
I can confirm the described behavior:
If you drive along the red arrow, than a rerouting would happen.
After new route is calculated, the announcement would be:
“In 100m turn right”.
But this announcement only fits, if you drive in the green direction.
If you continue driving in the red direction then another recalculation happens:
Then the resulting announcement would be:
“In 200m turn right”.
And so on, until eventually a new route towards the red direction would be found.