The method of Kurviger is realy genial! Better than all from others (using shaping points) what I saw until now. A BIG THANK YOU to the developers!
That is one thing of the Kurviger method. Reached after some discussion in the forum.
And changes in this point perhaps bring disadvantages for the WHOLE Kurviger method! Therefore proposals are to be analyzed first with a view to the whole method. Our developers (emux for the app, robin for the website) do here excelent work!
Each routing software (garmin, tomtom, locus, kurviger, …) has its own philosophy for the algorithms. Therefore each system has its own route. When looking on different systems with the same waypoints there are different routes. And the routes of Kurviger are very fine results for motorcyclists, usable in navigation with more or less strictness or flexibility in following the route! Selectable automatic or manual rerouting. A lot of experienced users prefer the manual rerouting.
To your video: Why you don’t give a link to the route (short link or URL)?
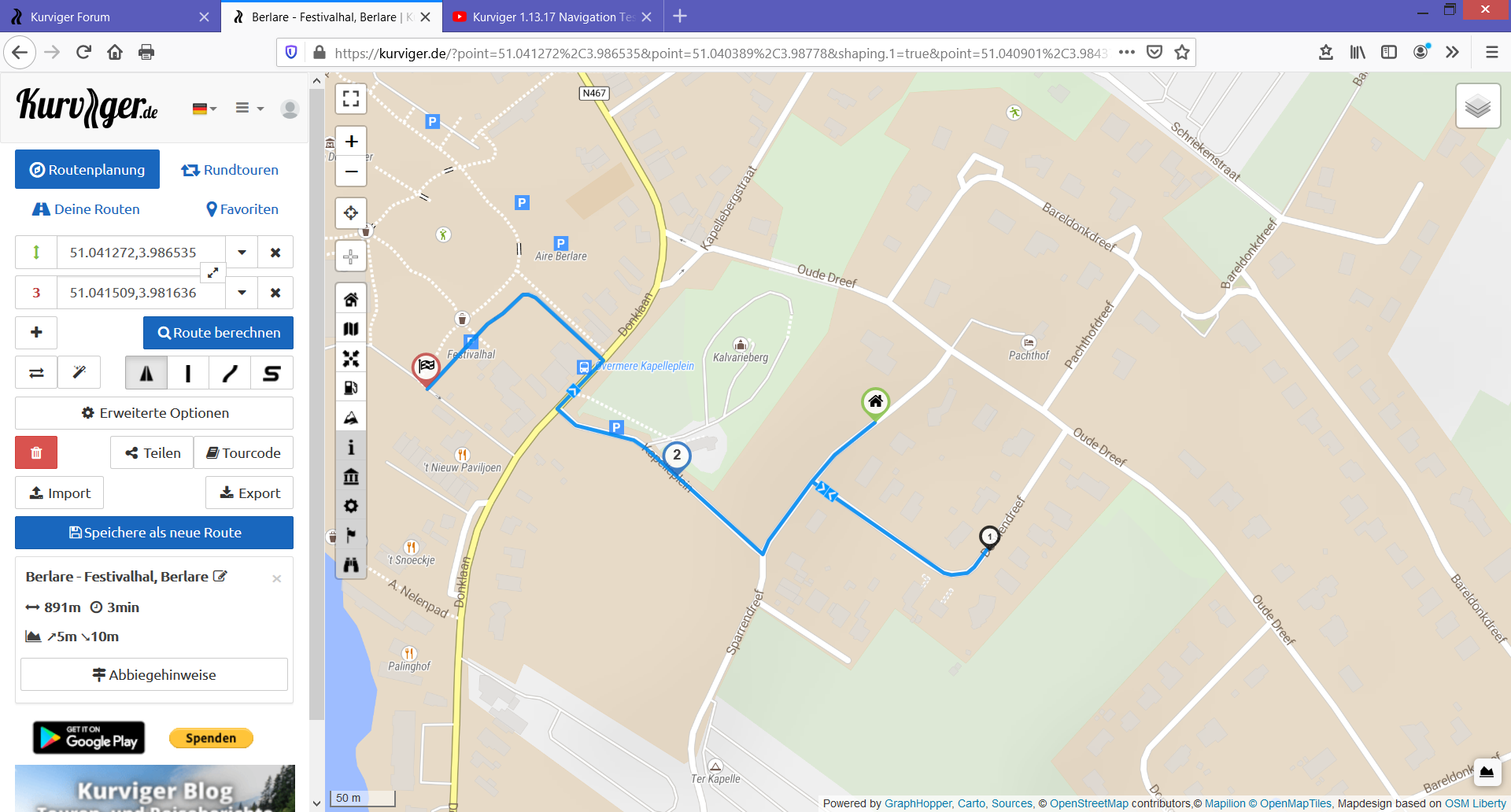
Spending a lot of time I reproduced your example.
The initial route seems to be https://kurv.gr/Lcdy4.
Without the shaping point in the Dennendreef it is https://kurv.gr/LbfAG.
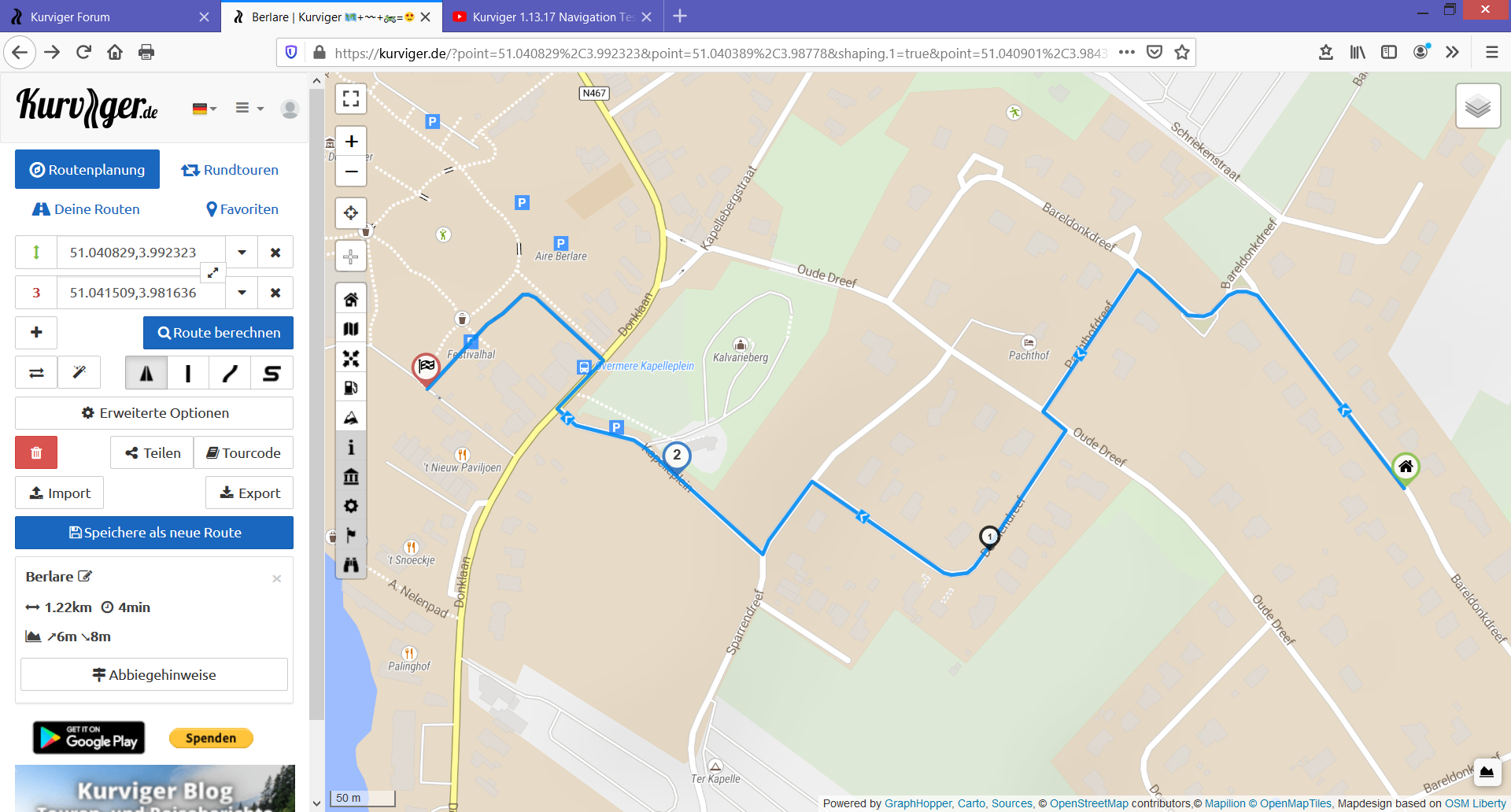
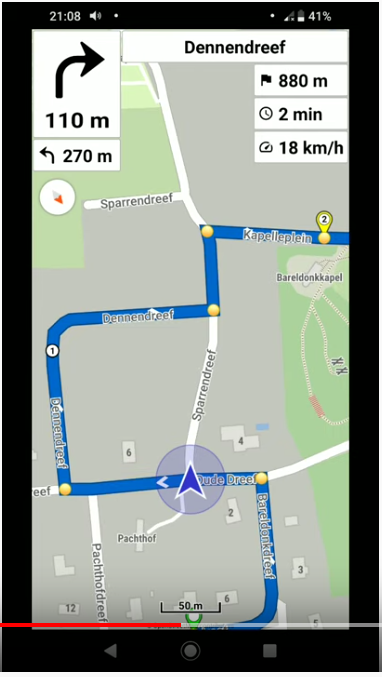
In your video you leave the initial route (in Bareldonkdreev you go straight on instead of turn left). Then rerouting is done:
Rerouting is done that you can drive forward, You don’t have to make a U-turn.
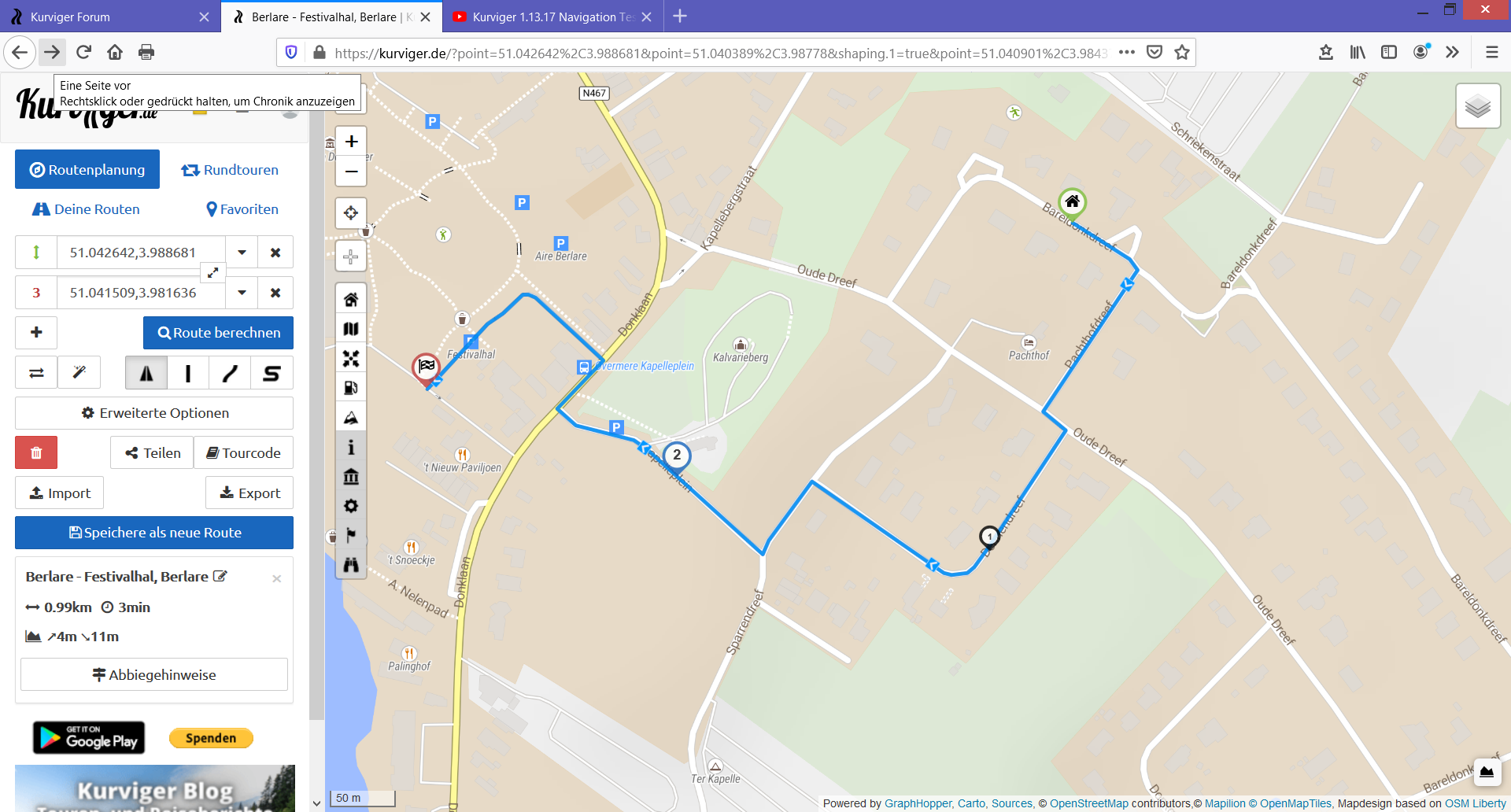
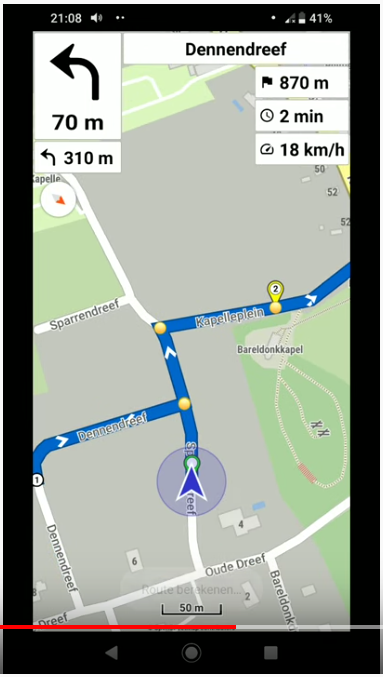
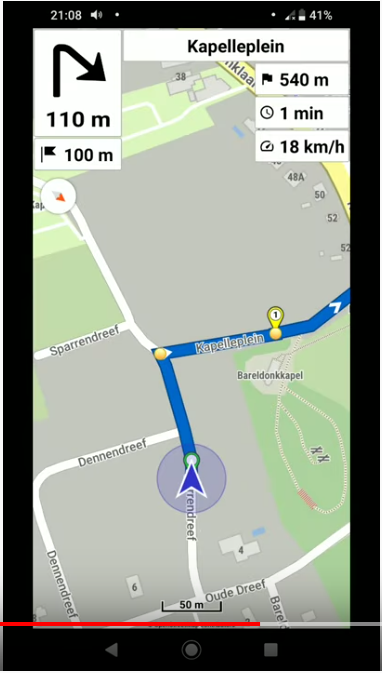
To rebuild the remaining route i had to move the position behind the curve seeing in the picture above. The route is https://kurv.gr/Ebkbp.
When taking the position of the rerouting the route would be
Here a U-turn would be necessary! But the Kurviger method of rerouting let you drive without U-turn! Well done, Kurviger! That we have a rerouting as done, avoyding A U-turn!
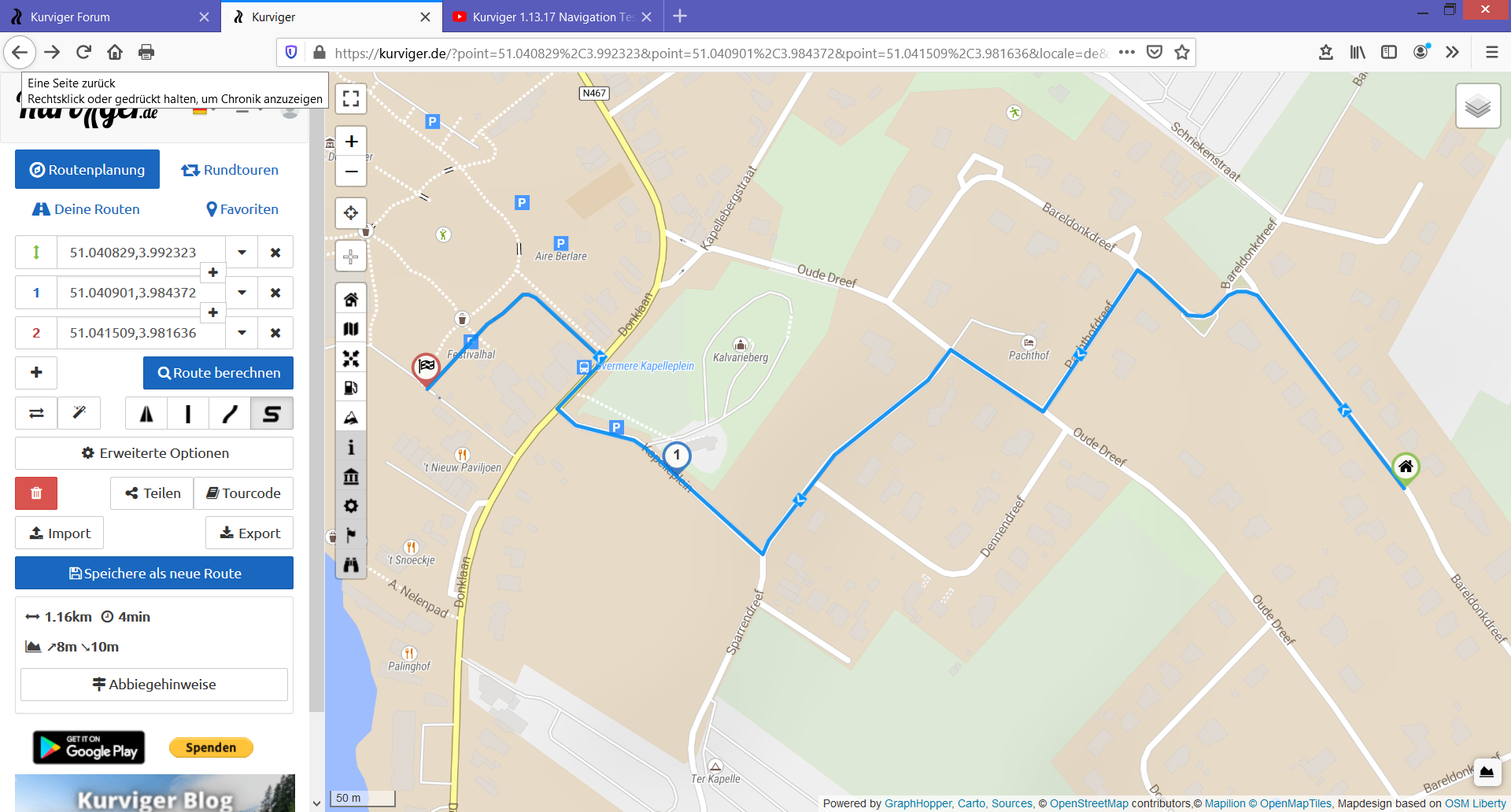
You leave the route of the rerouting at the Oude Dreev. Instead of going straigt on you turn right in the Sparrendreev. Rerouting is done.
The route is https://kurv.gr/6gDRv.
As we can see, the shaping point is not ignored!
And this is what I like at the current Kurviger Method! When I don’t want to pass a certain road segment (represented by a shaping point in this segement) then I don’t need setting a shaping point there! And when setting a shaping point then it should not be ignored by Kurviger. This currently is solved excelent in Kurviger in the flexible and strict mode at rerouting!
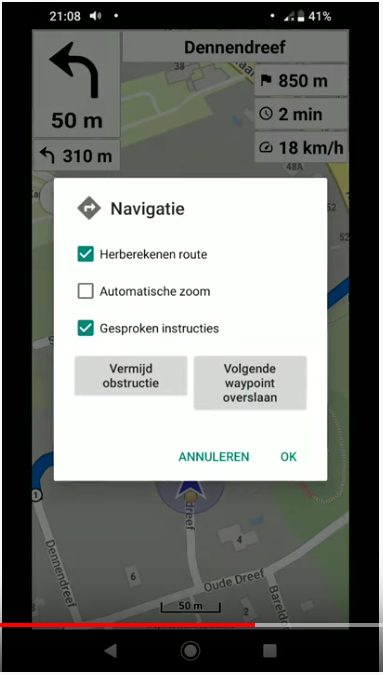
In this case the solution in Kurviger is to skip the next waypoint. It seems that you used this action.
I prefer the current behaviour and possibilities of Kurviger in this case. And therefore I don’t want an automatism for ignoring the shaping point (in your example)!